During the studies at the IEM, we realized this project under the supervision of the Professor Winfrid Ritch. The aim of this installation is to play different sine waves through a long metal wire, that resonates within the surrounding space.
Biography:
Alvin Lucier founded the Sonic Arts Union in 1966 together with composers Robert Ashley, David Behrman and Gordon Mumma. Lucier is one of the pioneers of contemporary musical composition and performance. In recent years he has emerged with a series of sound installations as well as compositions for solo instruments, chamber ensembles and orchestra. In these works, sound waves are set into spatial movement through precise voicing. Alvin Lucier works in North America, Europe and Asia. In 1989 he installed his “Music on a Long Thin Wire” in Kyoto. In 1990 he was a guest of the DAAD in Berlin for six months and in 1992 guest composer at the festival “Time of Music” in Viitasaari, Finland.
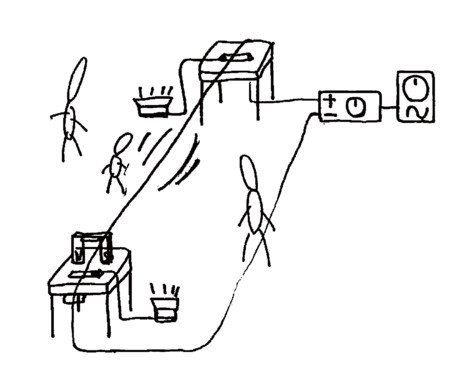
In his own words (1992): “Music on a Long Thin Wire is constructed as follows: the wire is extended across a large room, clamped to tables at both ends. The ends of the wire are connected to the loudspeaker terminals of a power amplifier placed under one of the tables. A sine wave oscillator is connected to the amplifier. A magnet straddles the wire at one end. Wooden bridges are inserted under the wire at both ends to which contact microphones are embedded, routed to a stereo sound system. The microphones pick up the vibrations that the wire imparts to the bridges and are sent through the playback system. By varying the frequency and loudness of the oscillator, a rich variety of slides, frequency shifts, audible beats and other sonic phenomena may be produced.”[1]