During this semester, I was able to learn countless notions that led me to the realization of the first prototype of this instrument.
Despite the difficulties, I was able to narrow down the field of variables and question marks that stand between me and the realization of the final product. Through research and experimentation, I acquired the skills to be able to plan the following steps that separate me from the final goal: the realization of a fully automated Hackbrett.
About the physical construction of the instrument. The next step is to build a support capable of holding the hammers for each string of the instrument. As already demonstrated with the prototype, the aim is to obtain a modular structure that can be customized according to technical and artistic requirements.
From the software point of view, the next step is to create a GUI in Pure Data to control the instrument via OSC (Open Sound Control). As a starting point, I will use the library written by Professor Ritsch, LEMiot[1]:
“Making Computermusic Devices using ESP32x with various sensors and actors is the overall goal for the LEMiot project. Using IoT (Internet of Things) technology to interact in Music Performances and Theatre projects or as sound installations. This library is a firmware framework for controlling LEMiot boards using the library ‘OSC_networking’ as device and WiFi management, parameter storage and additionally a simple user interface with LEDs and buttons. Each board as an incarnation extends these functionalities by integrating additional sensors or actuators. The device can be controlled wirelessly using a special ‘OSC’ protocol. A Configuration Tool with Puredata as also a corresponding Puredata library”
This step will enable me to learn the different techniques for interacting with the instrument and the parameters to be mapped. Moreover, the skills to program my own Networking environment.
Another important step to be taken, is the realization of a functional algorithm for the pitch detection. As discussed in previous chapters, my initial approach involves utilizing zero crossing analysis on each individual set of strings. To accomplish this, I will divide my tasks into two sub-levels: software and hardware:
– regarding the software aspect, I will employ the “~zexy”[2] extension for Pure Data, developed by Professor Johannes Zmölnig. This extension provides valuable examples and resources for pitch detection using zero crossing techniques. By studying these principles, I will gain a solid foundation and understanding. Eventually, I aspire to write my own pitch detection algorithm directly on the microcontroller, allowing for a more streamlined and integrated solution.
– regarding the hardware part, I will use the Calliope-board[3] for the further developments. This board offers several advantageous features, including six microphone inputs and an integrated Mosfet system designed for solenoids. These components encompass all the necessary elements to realize the final product effectively.
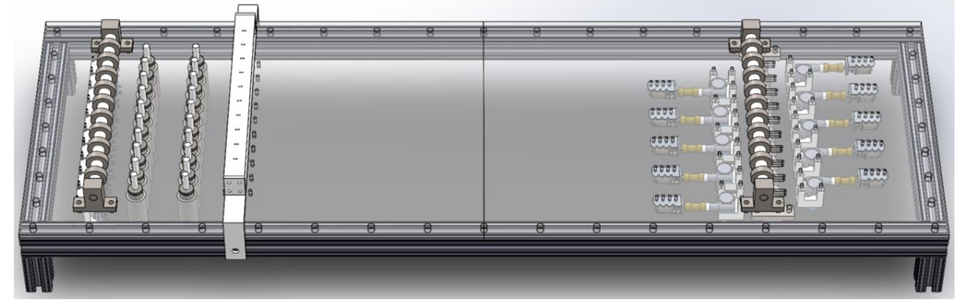
The final element that remains is the development and integration of a servo motor system for tuning the instrument. However, I have not yet discovered a suitable approach for this specific purpose. The Hackbrett’s strings are closely spaced, which presents a challenge in independently controlling them. Therefore, our initial step will involve designing a system similar to the one depicted in the provided image /Fig. 1).
[1] Ritsch, Winfried UC / LEMiot library · gitlab, GitLab. Available at: https://git.iem.at/uC/LEMiotLib (Accessed: 16 June 2023).
[2] Pure Data Libraries / Zexy · GITLAB (no date) GitLab. Available at: https://git.iem.at/pd/zexy (Accessed: 16 June 2023).
[3] Ritsch, Winfried IEM development area, Sign in · GitLab. Available at: https://git.iem.at/ritsch/calliope (Accessed: 16 June 2023).
In the initial phase, I embarked on a series of experiments using PD (Pure Data) to analyze the input signal derived from my prototype. Here the aim was to understand how to get the parameters for the servos to tune the strings.
At first, I employed an FFT (Fast Fourier Transform) algorithm to determine the algorithm’s ability to track the pitch of the incoming signal and see how reactive and precise the analysis response while changing the tension of the strings.
To achieve that, once obtained the fundamental and the first three partials of the incoming signal, I divided the process into two steps:
convert the difference of the estimated pitch and the incoming signal (changing the tension) into semitones:
attribute the estimated difference in semitones as pitch parameter of a “pitchshifter”.
The limitation:
FFT analysis of complex signals and the latency introduced while processing the data:
the interference between the harmonics produced by different strings can create complex frequency interactions that are not easily captured by a simple conversion method. To improve the reliability of the analysis, it would be necessary to employ more sophisticated techniques that take into account the complex harmonic relationships occurring during simultaneous string play. This could involve employing advanced signal processing algorithms or considering the specific characteristics of each string, such as its tuning, tension, and resonance properties.
The second step consisted into the application of zero crossing analysis to find the pitch of the strings. Even though I was not able to implement this process during this semester, I came out with rather interesting solutions to implement it.
First a brief introduction to the subject… In the audio domain, zero crossing[1] is an important concept that is frequently used in pitch recognition and estimation. Pitch recognition refers to the process of identifying the fundamental frequency or musical pitch of a sound.
Zero crossing analysis is employed as a technique for pitch recognition due to its effectiveness and simplicity. The fundamental frequency of a sound corresponds to the rate at which the waveform crosses the zero level. By counting the number of zero crossings within a specific time frame, it is possible to estimate the pitch of the sound.
As we traverse through the audio samples, we examine each point. If the amplitude of the current sample (N) is equal to the silent threshold and the amplitude of the following sample (N + 1) is either higher or lower than the silent threshold, then the sample point at (N) is identified as a zero-crossing point. Once we determine the number of zero crossing points, we can utilize the sampling rate of the signal and the total number of samples to calculate the duration in seconds over which these zero crossing points were counted.
The formula for this calculation is:
Number of seconds = Total number of samples / Sampling rate
Considering that each oscillation of a signal encompasses two crossings of the silent threshold, we can determine the number of oscillations by dividing the total number of zero crossing points by two.
The formula is:
Number of oscillations = Total number of zero crossing points / 2
To ascertain the frequency of the input audio signal, we employ the values obtained from steps 2 and 3. The formula for calculating the frequency in Hertz is:
Frequency of input audio signal = Number of oscillations / Number of seconds
The methodology of zero crossing analysis offers various approaches and combinations that can yield accurate results. However, upon analyzing different projects, it becomes evident that limitations arise when the input signal comprises multiple simultaneous sounds rather than a single waveform.
To overcome the challenge of analyzing complex instruments like the Hackbrett, I have reached a possible realization for the upcoming developing time. When dealing with instruments that produce overlapping sound sources, such as multiple strings being played simultaneously, it becomes essential to implement a specialized approach to improve the accuracy and reliability of the analysis.
One effective solution involves recording each string separately and isolating their individual signals. Moreover, since we already know the frequencies associated with each string, we can leverage this information to our advantage by applying a “third-octave filter”[2] at the input stage to attenuate any potential interferences arising from other strings.
After researching about the topics, I encountered one project made at the IEM by Winfried Ritsch about acoustic of music instruments, the “IAAI[3]”:
“The basic idea is to use the acoustics of the instrument as an instrument, for example as part of a feedback loop. In the acoustics of an instrument, we consider the entire signal path, from the excitation of the strings to the radiation, so pickups in combination with loudspeakers and magnetic actuators for vibrating strings are also part of the acoustic system of the instrument”
Even though the purpose of this research is focused on other aspects, it shows an implementation of technics that fit to my research about finding the best way to detect the pitch.
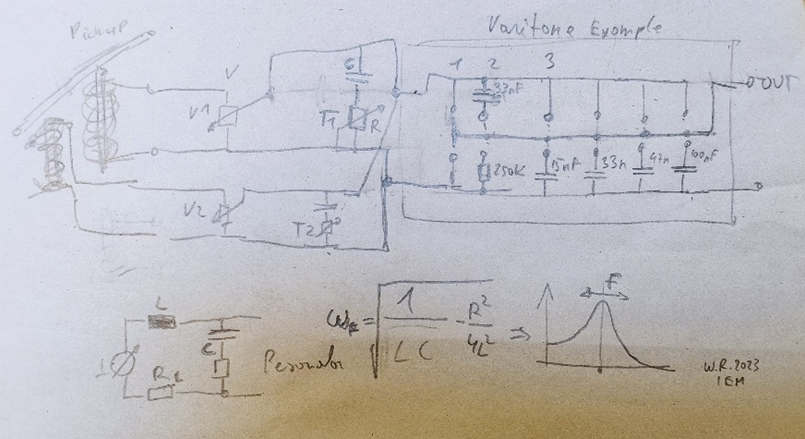
In the specific, the idea of using the “Varitone”[4] to build resonant filters.
The “Varitone” is an electronic circuit found in electric guitars that alters the sound by changing the frequency response. It uses capacitors and resistors connected to the guitar’s pickups to create a low-pass filter network. A rotary switch on the “Varitone” circuit selects different capacitor and resistor combinations, changing the cutoff frequency of the filter.
Rotating the “Varitone” switch modifies the circuit’s capacitors and resistors, which adjusts the cutoff frequency. This affects the amount of treble reduction, resulting in different tones. By passing the guitar signal through various capacitor and resistor combinations, the circuit modifies the frequency response, impacting the amount of high-frequency content reaching the amplifier and creating tonal variations. Since the principle of this system consists precisely in obtaining filters that can be set to different frequencies, I thought of combining this technique for a system of piezo microphones positioned on the instrument.
In the Fig. 8, a draft made by Professor Ritsch that represent the electronics of this system.
Once the strategy of how to apply the electronics to filter the input signal has been analyzed, I moved on asking myself how to record the signal coming from each string. Here two approaches that I have identified as possible solutions to record the strings separately:
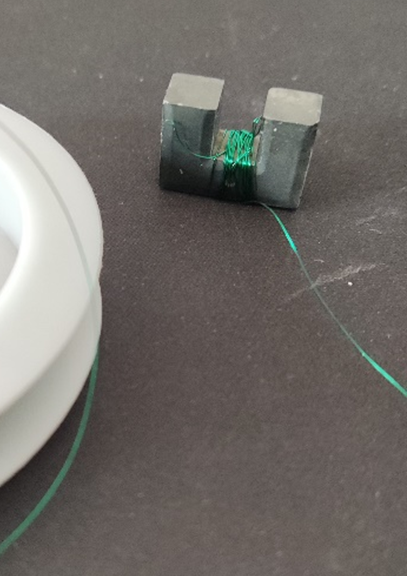
handmade pickups made by ferrites;
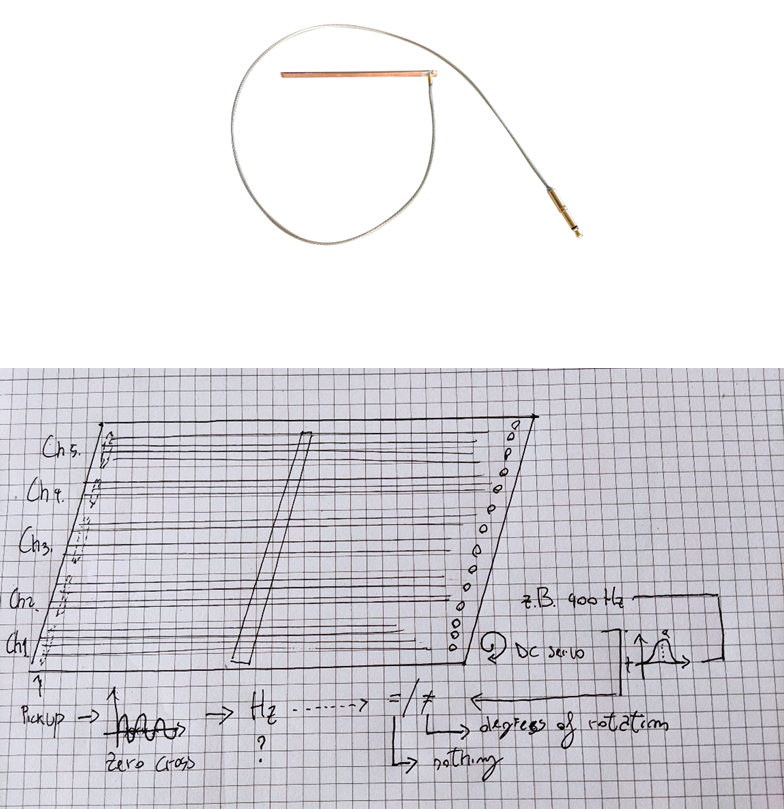
elastic pickups (Fig. 11) that I used in the past to build guitars and positioning them underneath each choir of the Hackbrett. The advantage of using this piezo is that I could cut them into small pieces and make different microphones from one stick. As we can see in the Fig. 10, I divide the strings into channels to be sent to the pitch detector. Once the analysis is done, I compare the outcoming frequency with the given one of the string to adjust then the servo motor.
[1] Daoo, R. (2020) Algorithmic frequency/pitch detection series – part 1: Making a simple pitch tracker using zero…, Medium. Available at: https://medium.com/the-seekers-project/algorithmic-frequency-pitch-detection-series-part-1-making-a-simple-pitch-tracker-using-zero-9991327897a4 (Accessed: 09 June 2023).
[2] Third-octave filter banks. Available at: https://ccrma.stanford.edu/realsimple/aud_fb/Third_Octave_Filter_Banks.html (Accessed: 09 June 2023).
[3] Ritsch, Windried (no date) Imle, iemCloud. Available at: https://cloud.iem.at/index.php/s/oXcznxBe2TMmZbn?dir=undefined&path=%2FIAAI%2Fdoku&openfile=2966930 (Accessed: 16 June 2023).
[4] Selmer Varitone (no date) TCGAKKI. Available at: https://tcgakki.com/en/pages/selmer-varitone (Accessed: 16 June 2023).
The development of accurate and reliable string tuners has been a subject of great interest and innovation in the field of music technology.
As a result, numerous projects and technologies have emerged, each aiming to provide precise pitch detection and tuning capabilities for stringed instruments. In this analysis, we compare two prominent projects in the field of pitch detection string tuners to identify the most effective approach for advancing my own project:
By analyzing these two projects, I aimed to identify the strengths and weaknesses of each approach and determine the most effective way to proceed with our own pitch detection string tuner project. This analysis will consider factors such as accuracy, precision, responsiveness, hardware components, software algorithms, and potential areas for improvement. The goal is to leverage the insights gained from these existing projects to guide the development of our own innovative and highly precise pitch detection string tuner.
The Motorized Guitar Tuner (Fig. 6) is a hand-held device designed to automatically tune an electric guitar using a micro-controller and a servo motor. The device processes the guitar signal input precisely to provide high accuracy and implements an appropriate controlling algorithm for actuating the motor. The tuning results are quite good, but the accuracy is limited by the interaction of the different strings with each other and the guitar neck. The document discusses various methods for detecting zero crossings and generating PWM signals for controlling a servo motor. In the 2.2.4 chapter, the pure zero crossings method is discussed as a way to determine zero crossings without any previous calculations. However, this method was found to be unusable due to the presence of harmonic oscillations in the guitar string signal. On the other hand, the autocorrelation method was found to be more promising as it can point out periodic components very well, even in the presence of noise or distinctive harmonic oscillations. Therefore, the autocorrelation method was chosen as the preferred method for frequency detection.
The second project create a mechatronic string instrument called “Cyther V3” (Fig. 7) that can autonomously tune each string during a performance. The tuning system senses string tension, estimates pitch, adjusts the tension, and corrects for errors in estimation using optical pickups. The tuning system was tested and found to be accurate within +/- 8 cents, but not precise enough for error to go undetected by human perception.
The tuning system is designed to sense the pitch of each string in a way that allows the instrument to create various pitch changing techniques like portamento and vibrato at all times during a performance. The system uses tension sensors to sense the tension in each string and estimate the pitch of the string. The actuators of this tuning system should be able to adjust the pitch of any string by a semitone in 100ms or less.
The software has a form of closed loop control to keep every string at a desired pitch. It should adjust the pitch estimation function over time to compensate for small changes to the instrument that alter the strings’ pitches.
The system uses optical pickups to measure the frequency of each string. The frequency information is used to update the curve that relates the frequency of the string to the tension sensor’s potentiometer value to prevent the error in the tuning system from compounding.
[1] TU Graz. Available at: https://www2.spsc.tugraz.at/www-archive/downloads/MGT_documentation.pdf (Accessed: 09 June 2023).
[2] Dynamically tuning string instrument – web.wpi.edu. Available at: https://web.wpi.edu/Pubs/E-project/Available/E-project-012317-195256/unrestricted/Dynamic_Tuning_MQP.pdf (Accessed: 09 June 2023).
In my ongoing research on controlling solenoids, I have been exploring the use of PWM (Pulse Width Modulation) as a strategy to control these actuators. To enhance my understanding, I studied the work of Professor Winfried Ritsch, who has extensively researched this topic. Specifically, I found his “PWMEnvelope” [1] repository to be a valuable resource for experimenting with my instrument.
In this chapter of my research, I aim to summarize the key points that are essential for understanding and implementing Professor Ritsch’s code. By simplifying the concepts and principles, I hope to provide a clear overview of how the code functions and how it can be applied to my own project of controlling solenoids.
Envelopes are used to control PWM signals. In the attack phase, there is a fade to gradually reach the stroke level. After the stroke time, a sustain phase is applied to maintain the desired level, followed by a release phase to fade out the signal. By working with these parameters, we directly influence the timbral result. Like a piano key, by changing the level of pressure and duration of the attack we can achieve different sonic results. To ensure the safe operation of these devices, especially when using duty cycles lower than 100%, “PWM one-shot pulses” are utilized to prevent any potential issues.
Attack Stroke Hold Release for solenoids:
_ stroke level
/ |_____ hold level
_ / \_ off
A S H R times
To implement this functionality with the ESP platform, the LED-C Library[2] is used for generating the PWM signal, while the Timer library handles the one-shot timer feature.
The LED Control (LEDC) peripheral is a feature of ESP32 microcontrollers that is primarily used for controlling the intensity of LEDs. However, it can also be used to generate PWM signals for other purposes. The LEDC has 8 channels, each capable of generating independent waveforms. The LEDC channels usually have a 4-Channel high-speed mode and a 4-Channel low-speed mode, which provide different ranges of frequency for LED control.
The specific frequencies achievable in each mode may vary depending on the microcontroller or LED driver being used. These channels can be used to drive RGB LED devices, among other applications. The PWM controller of the LEDC allows for gradual increase or decrease of the duty cycle, enabling smooth fades without requiring processor intervention.
To set up a channel in the LEDC, three steps are involved:
Timer Configuration: Specify the PWM signal’s frequency and duty cycle resolution;
Channel Configuration: Associate the channel with the timer and GPIO pins to output the PWM signal;
Change PWM Signal: Modify the PWM signal to control the LED’s intensity.
The ESP32’s Timer Library[3] can be used to generate PWM signals by configuring it to repeatedly count up to a certain value and then reset. The ratio of the time it takes to count up to the reset value compared to the total period determines the duty cycle of the PWM signal. By adjusting the duty cycle, it can control the average power or intensity delivered to the device connected to the output pin.
When using multiple libraries or processes that rely on timers in the ESP32 microcontroller, it is advisable to allocate each process to a specific hardware timer or counter to avoid interference between the processes. By assigning dedicated timers to different processes, potential conflicts, such as conflicting interrupt handling or timing discrepancies, can be avoided. Moreover, assigning separate timers to different processes helps maintain the integrity of each process’s timing operations and provides precise timing control.
[1] Ritsch, W. IEM development area, Sign in · GitLab. Available at: https://git.iem.at/uC/pwmenvelope/-/tree/master/examples/playing (Accessed: 11 June 2023).
[2] Led control (LEDC) ESP. Available at: https://docs.espressif.com/projects/esp-idf/en/latest/esp32/api-reference/peripherals/ledc.html (Accessed: 11 June 2023).
[3] General purpose timer (no date) ESP. Available at: https://docs.espressif.com/projects/esp-idf/en/v4.3/esp32/api-reference/peripherals/timer.html (Accessed: 16 June 2023).
In this project, we explore the ongoing development of a project that began last semester, focusing on the creation of a musical instrument using microcontrollers and actuators. This semester, I have continued my research by building a prototype that demonstrates the basic functions to be implemented in the final product. Let’s take a journey through the design and realization phases, uncovering the steps that led me to choose the right materials and programming strategy for this project. Starting off, I conducted thorough research into musical instruments, their construction, and the mechanics behind their sound. With this insight, I moved into the design phase, blending creativity with practicality. I carefully considered the materials that would enhance the instrument’s expressiveness and capture its unique character. Through sketches and inspiration, I crafted a blueprint that aimed to create a captivating musical experience. However, design alone couldn’t bring the instrument to life; it required the combination of artistic and engineering skills. This led me to microcontrollers and actuators, which play a vital role in animating the instrument. The construction of the prototype marked a significant milestone. I brought my creative vision into tangible form. The prototype showcased the instrument’s essential features, demonstrating innovation and musical features. As the semester comes to an end, I am inspired by the melodies produced by the prototype, motivating me to refine every detail for the final product.
Below, the steps I had planned at the end of the first semester:
Implement PlatformIO[1] to connect the Arduino´s codes together and have a better and more fluent programming environment;
create a GUI that communicates with the instrument via Wi-Fi. Through OSC messages, I will map the following parameters:
the time interval between the beats of the solenoid;
velocity;
the degrees of rotation of the lever to vary the pitch;
the degrees of rotation of the tuning screws;
build two wooden sticks to support two hammers for each string.
change the tuning system of the “Hackbrett”, similar to a guitar´s one, to decrease the required torsion force for the DC motor to rotate them;
create different supports that fits the servos in order to change the tuning of the strings;
regarding the performative aspect of this instrument, I will implement one IR sensor to control the lever. I will map the movement of the hand to the steps of the motor to change the pitch through movement.
implement a small DC motor to control a sort of mute rail of the piano, damping the strings.
[1] PlatformIO Platformio is a professional collaborative platform for embedded development, PlatformIO. Available at: https://platformio.org/ (Accessed: January 26, 2023).
In order to effectively showcase the individual components that would eventually comprise the final instrument, I took the initiative to create a rudimentary version resembling a Hackbrett, utilizing a wooden board and a Floyd Rose tremolo system. This makeshift instrument boasted the inclusion of two strings and a mobile bridge, enabling the manipulation of string pitch without the need for mechanical screws.
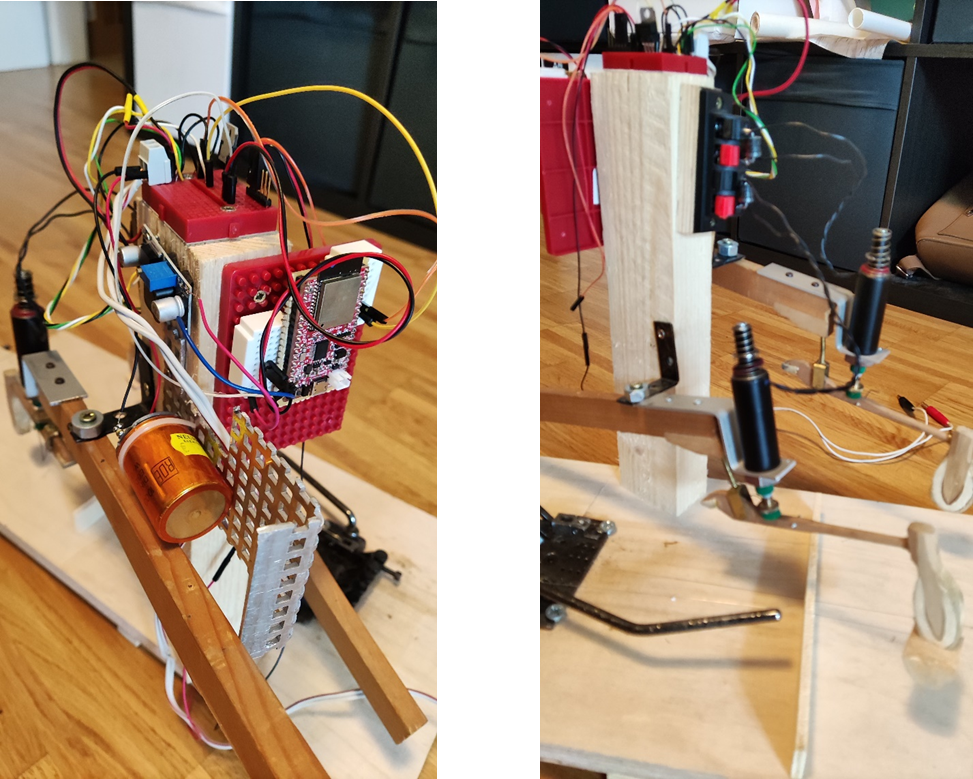
To emulate the motion of drumsticks required to play the instrument, I employed two piano hammers (Fig. 2) upon which I strategically positioned the two solenoids. These solenoids were connected to the structure through the help of a wooden stick, which also served as a housing for all the necessary electronic components (Fig. 1), ensuring a compact and conveniently transportable design. The resultant outcome was an instrument that facilitated effortless customization, thanks of its adaptable elements capable of being repositioned in space, thereby opening up a realm of diverse tonal possibilities to be explored.
The decision to use wood as the primary material for the instrument was driven by its acoustic characteristics. Even without the presence of a resonance chamber, wooden material offered a sound quality that closely resembled the desired outcome of the final product.
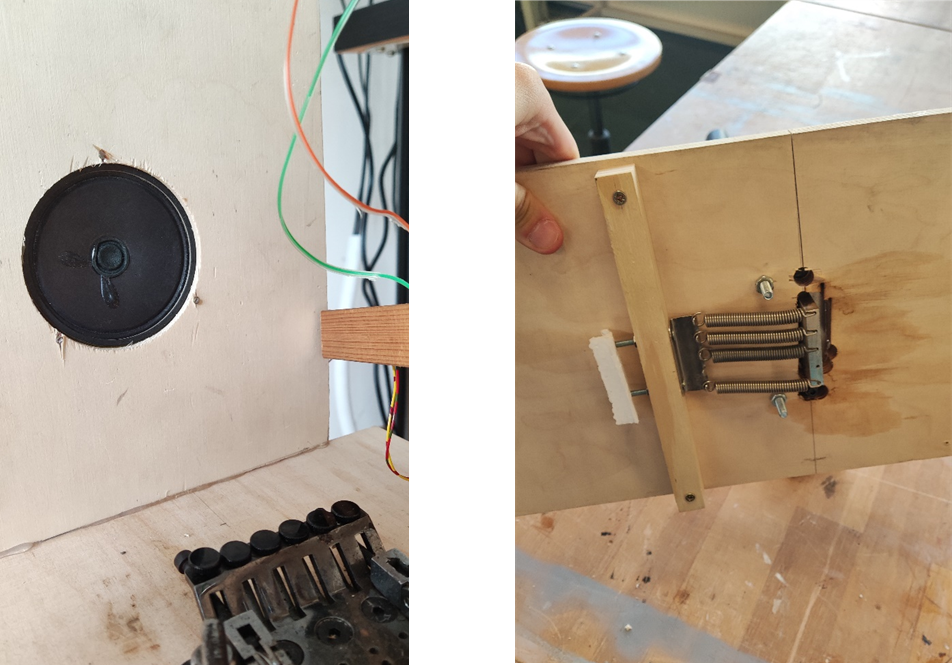
To capture the sound produced by the strings, I opted for an electric piezo system. This allowed for the isolation of the direct string sound from the mechanical sound generated by the solenoids. By employing this setup, I could accurately capture the nuances of the instrument’s natural vibrations while maintaining control over the mechanical elements. To amplify it, I mounted a speaker on a wooden plate that should has work as resonator. The entire amplification id driven by a D-Class amplifier PAM480[1], attached with the speaker directly on the body of the instrument (Fig. 3).
By fixing the Floyd Rose lever (Fig. 4) in conjunction with the stepper motor, I devised a solution using two small wooden pieces that served as a guide for the lever. This setup ensured that the lever remained stable and fixed during the tensioning process. Strategically positioning the stepper motor directly at the tip of the lever was a deliberate choice aimed at maximizing the advantage of leverage. By identifying the optimal leverage point, I could effectively exert tension on the strings with minimal effort from the stepper motor.
Regarding the use of the Servo motor, the idea is to simulate a feature of the final instrument that will be applied during the next semester, i.e. a mute that can attenuate the strings. As can be seen in Fig. 5, the pedals are connected by a string to a wooden rod and felt, which acts as a mute if necessary.
[1] GmbH, B. 73 A. (no date) Startseite, Startseite • FUNKAMATEUR OnlineShop. Available at: https://www.box73.de/product_info.php?products_id=4391 (Accessed: 15 June 2023).
Craig Henighan is a sound designer for the science fiction TV series “Stranger Things,” which is considered a masterpiece when it comes to sound design. There is much to discuss regarding the entire sound design and production. I will touch on only a few points that I found impressive.
Main themes: Starting with the opening, composed by Kyle Dixon and Michael Stein capture the vibes of ’80s horror movies. The main theme was created using the Roland Juno 6, known for its excellent built-in arpeggiator, while other themes were produced with the Sequential Circuits Prophet 5, one of the first synthesizers to introduce presets, designed by Dave Smith.
Haunting clock: In Season 4, a haunting grandfather clock becomes a signature sound effect connected to the Vecna’s character. Henighan creatively manipulated it by layering multiple clock ticks, experimenting with cello strings for a groan-like effect, and adding a slowed-down, descending tone for the final chime, amplifying its eerie presence in the world of the story.
Vecna For the monster (Vecna) sound the sound designer heavily compressed the audio and boosted the low-end EQ, then applied the Infected Mushroom plug-in Manipulator for pitch shifting. Reverb and delay effects were added before Mark Patterson, the dialogue and music mixer editor, applied his own processing and dynamically panned Vecna’s voice for spatial depth.
Centrum Nauki Kopernik (Copernicus Science Centre) in Warsaw, Poland provides various exhibitions/performances/concerts for educational and entertaining purposes. The place is quite unique when it comes to acoustics. The spaces are designed flexible to accommodate diverse events. This includes implementing noise and reverberation control measures, integrating audiovisual systems.
At the beginning of January I was invited to the concert of “Cello 2 cello” band, consisting of two cellists: Izabela Buchowska and Agnieszka Kowalczyk. Their music blends classical, folk, and contemporary styles. They perform in Poland and worldwide. I found the concert very entertaining. The repertoire was not appealing to my personal musical taste, but I liked the creative and technically level of performance. The repertoire mostly covered popular songs like ABBA, Libertango by Piazzola, Lady Gaga, and Game of Thrones. Of course, one of the biggest advantages was the acoustics of the hall. Every note sounded clear and rich, filling the space beautifully. The sound was warm, making the music feel immersive.
Another event that made a great impression on me in this hall was a concert under the stars and a journey inside the moon. During the entire concert, you could lay on pillows and watch the cosmos accompanied by ambient music. It was one of the most beautiful concerts I got to experienced.
The movie had its first showing at the Toronto International Film Festival as part of the Special Presentation and was nominated for an Oscar award. Its spectacular painting animation was appreciated at the Gdynia Film Festival. The creators got the Audience Award and a Special Award for its unique look.
The newest version of “The Peasants” movie catches attention because of its unusual style. Instead of regular filming, it tells the story using painted pictures, similar to the concept of “Loving Vincent”. It’s inspired by an artistic period called Young Poland. According to Filmweb website, the movie is made up of about 80,000 pictures painted with 1350 liters of paint.
Music is composed by a polish hip-hop producer Łukasz L.U.C. Rostkowski. It’s a kind of “Slavic New Age” with beat music consisting of various influences that come across as a musical experiment. He did a great job in my opinion. The music creates a typical rural atmosphere, it is boisterous and joyful. “Chłopi” is an international project and L.U.C also tried to create such music. There is Polish folk, Slavic music, but it is filtered through the inluences like Massive Attack, Tricky, Portishead. I am sure it makes music interesting also for other cultures.
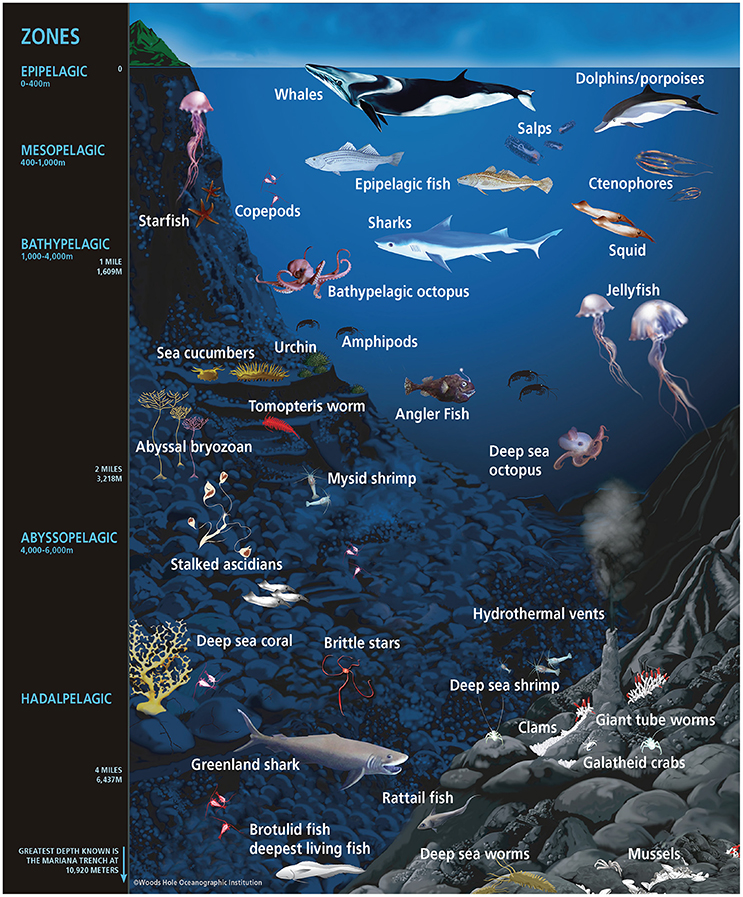
The sound of the ocean can change based on the depth of the water, and these changes are influenced by various factors.
Sunlight zone:
This is the top layer, also called the epipelagic zone, where sunlight reaches. It goes down to 200 meters. It’s likely to hear more pronounced crashing and breaking of waves.The sounds may be sharper, and you may also hear the bubbling and hissing as waves interact with rocks and the seafloor.
Twilight zone:
Below the sunlight zone is the mesopelagic zone (from 200 meters to 1,000 meters). It’s called the twilight zone because there’s only a little bit of sunlight that reaches here.In mid-depth waters, the waves may become more regular and rhythmic.
The sound of waves breaking may still be present, but it could be more consistent and less turbulent compared to shallower areas.
Midnight zone:
Deeper down is the bathypelagic zone, from 1,000 meters to 4,000 meters. It’s super dark here, so it’s called the midnight zone. The only light comes from creatures that glow in the dark. The temperature is pretty much the same all the time, and the pressure is very high.
In deeper ocean waters, the sound of waves breaking becomes less pronounced. Instead, you might hear a more continuous, low-frequency background noise.
The ambient noise in deep waters is often dominated by natural sounds such as the movement of water currents, the creaking of ship hulls, and marine life.
Abyssal zone:
The abyssal zone is from 4,000 meters to 6,000 meters. It’s the deepest part of the ocean, where it’s freezing cold and pitch black. Not many creatures can survive in this zone. In the deepest parts of the ocean, like oceanic trenches, the ambient sounds are typically very low-frequency.
Whales are travelling all the way till Abyssal zone.
References: 1. https://www.whoi.edu/know-your-ocean/ocean-topics/how-the-ocean-works/ocean-zones/ 2. Exploring the ocean through soundscape – Jennifer L. Miksis-Olds, Bruce Martin, Peter L. Tyack 3. https://nhpbs.org/natureworks/nwep6c.htm